|
De_ES 2113
Make a dice
|

|
|
De_ES 2113
Make a dice
|
|
#include "Accelerometre.h"#include "main.h"#include "mcc_generated_files/spi1.h"#include "mcc_generated_files/pin_manager.h"#include "Mc32Delays.h"#include "DeElectronique.h"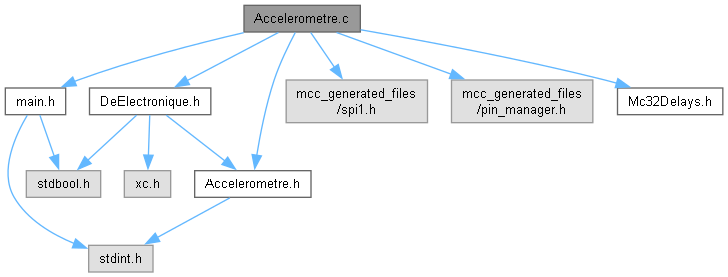
Macros | |
| #define | DUMMY 0xA5 |
Functions | |
| void | MC3419_WriteAnyMotionRegister (uint16_t treshold) |
| Écrit la valeur du seuil AnyMotion dans le registre du capteur. | |
| void | MC3419_WriteAnyMotionDebounceRegister (uint8_t tresholda) |
| Écrit la valeur de debounce AnyMotion dans le registre du capteur. | |
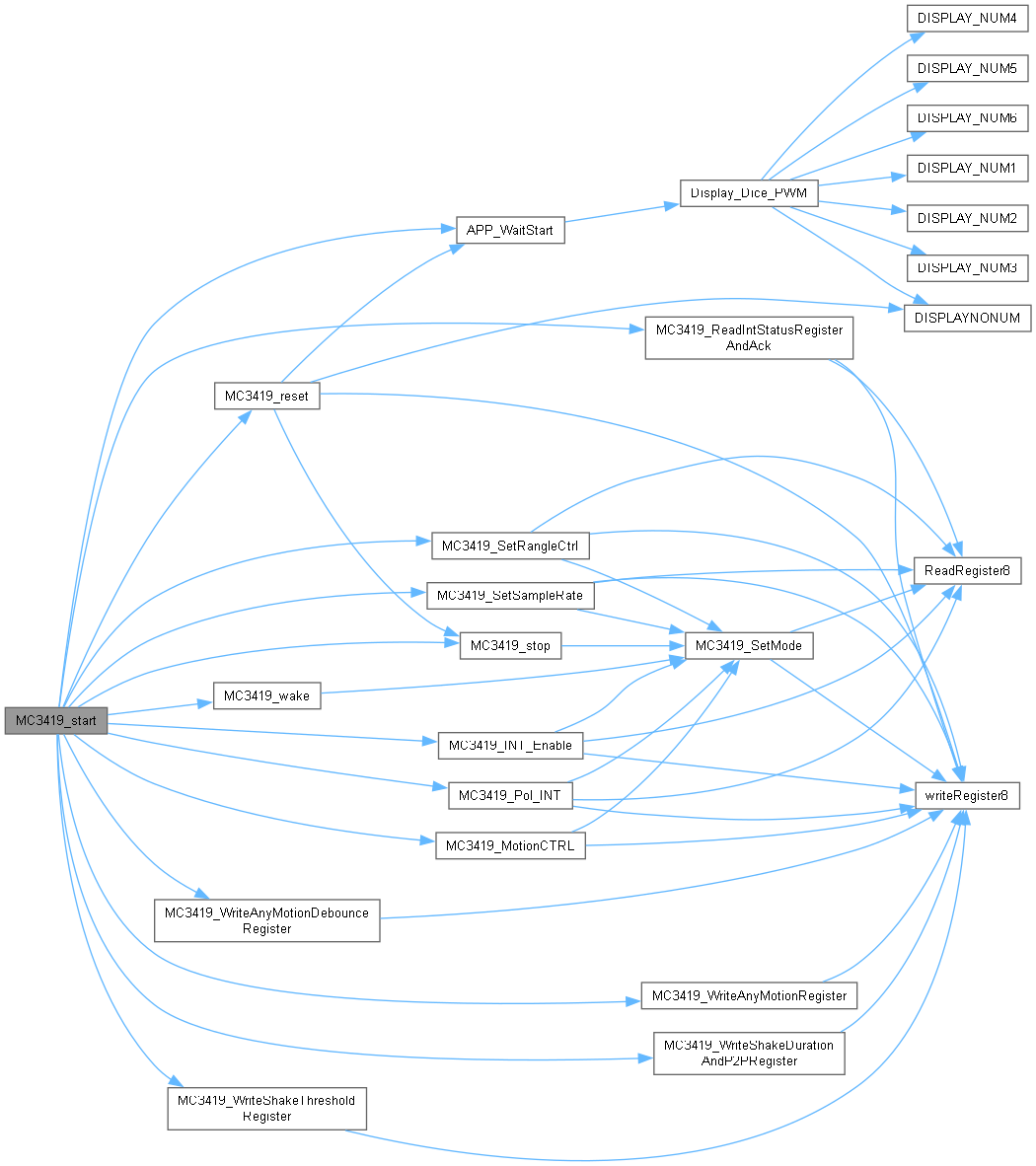
| void | MC3419_start () |
| Initialise le capteur MC34X9 avec la configuration par défaut. | |
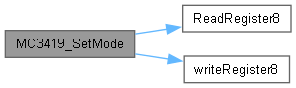
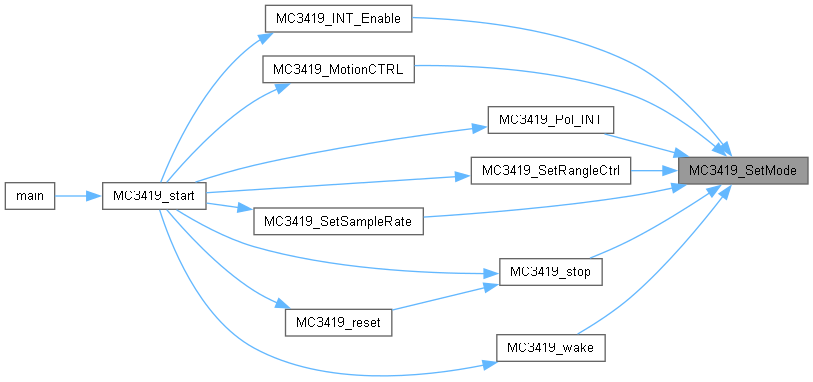
| void | MC3419_SetMode (MC3419_Mode Mode) |
| Définit le mode de fonctionnement du capteur. | |
| void | MC3419_SetRangleCtrl (MC3419_Range Range) |
| Définit la plage de mesure du capteur. | |
| void | MC3419_SetSampleRate (MC3419_SamplRate SampleRate) |
| Définit la fréquence d'échantillonnage du capteur. | |
| void | MC3419_wake (void) |
| Met le capteur en mode wake (actif). | |
| void | MC3419_stop (void) |
| Met le capteur en mode standby (veille). | |
| void | MC3419_reset (void) |
| Effectue un reset initial du capteur. | |
| uint8_t | MC3419_ID (void) |
| Lit l'identifiant du capteur. | |
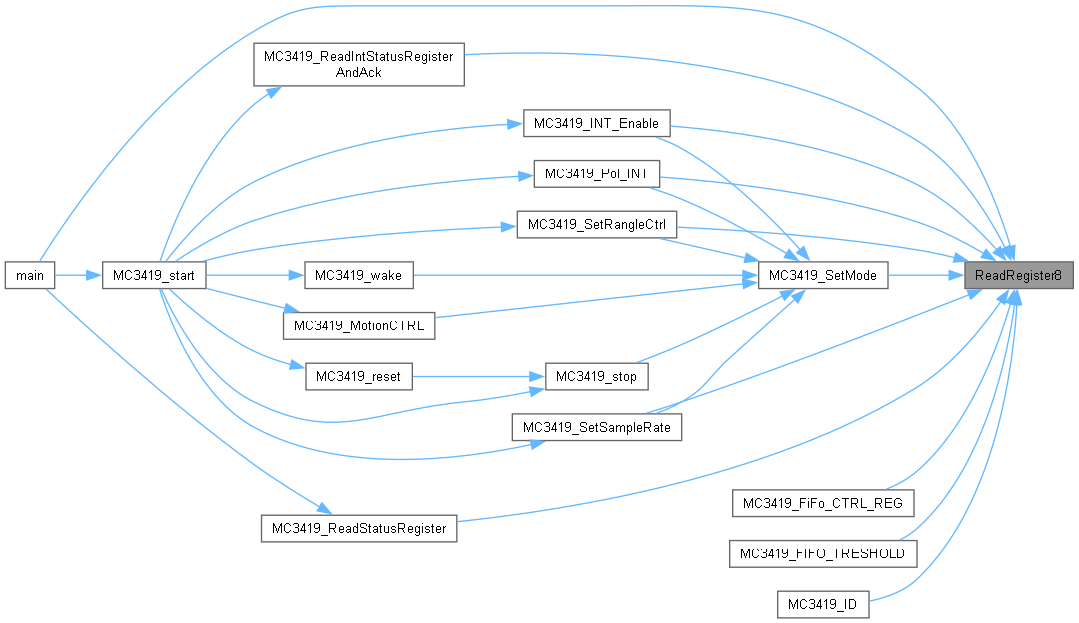
| uint8_t | ReadRegister8 (uint8_t address) |
| Lit un registre 8 bits du capteur. | |
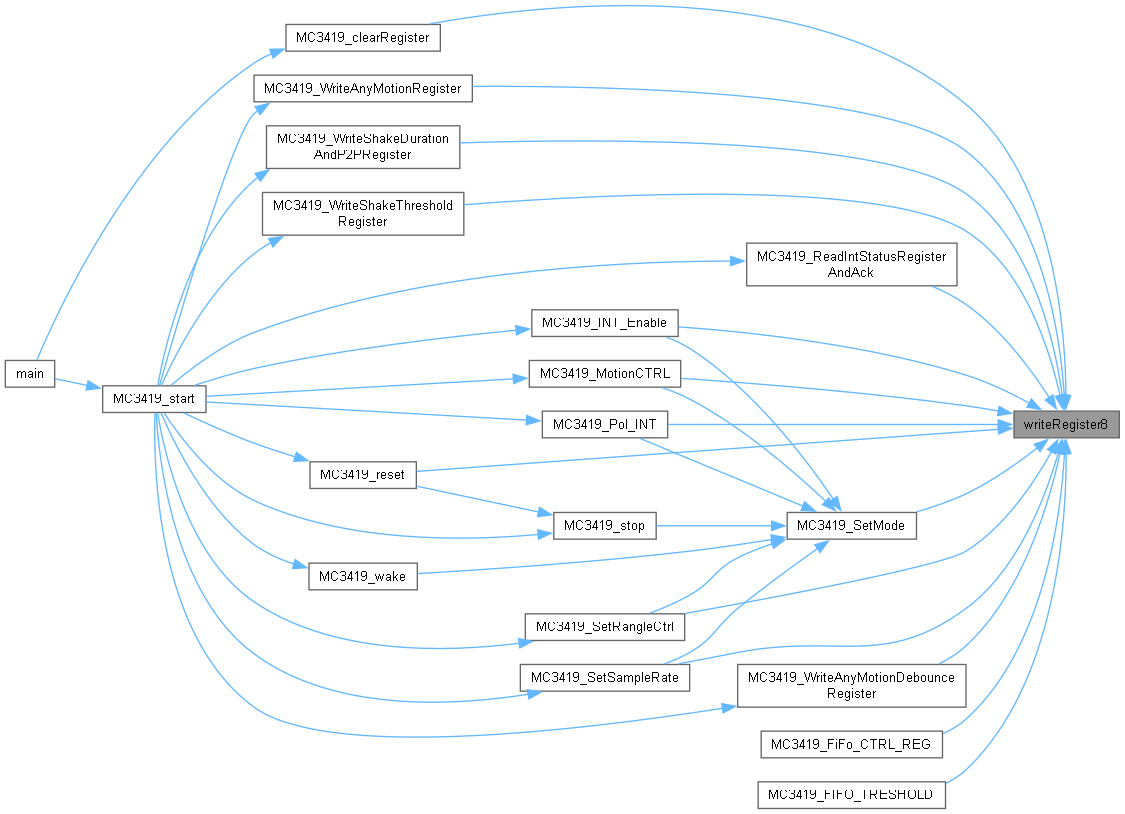
| void | writeRegister8 (uint8_t address, uint8_t data) |
| Écrit une valeur 8 bits dans un registre du capteur. | |
| void | MC3419_Pol_INT (MC3419_GPIO_CTRL GPIO_CTRL) |
| Définit la polarité des interruptions du capteur. | |
| void | MC3419_INT_Enable (MC3419_INTR_CTRL INTR_CTRL) |
| Active les interruptions du capteur. | |
| void | MC3419_MotionCTRL (MC3419_MotionControl Motion) |
| Configure le contrôle de mouvement du capteur. | |
| uint8_t | MC3419_ReadStatusRegister (void) |
| Lit le registre de statut des interruptions du capteur. | |
| uint8_t | MC3419_ReadIntStatusRegisterAndAck (void) |
| Lit et acquitte le registre de statut des interruptions du capteur. | |
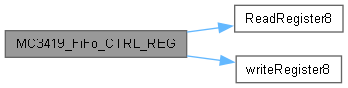
| uint8_t | MC3419_FiFo_CTRL_REG (MC3419_FIFO_CTRL ValCTRL) |
| Configure le registre de contrôle FIFO du capteur. | |
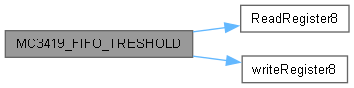
| void | MC3419_FIFO_TRESHOLD (uint8_t Fifo_Tresh) |
| Définit le seuil FIFO du capteur. | |
| void | MC3419_WriteShakeThresholdRegister (uint16_t Value) |
| Écrit le seuil de détection de secousse (Shake) dans le capteur. | |
| void | MC3419_WriteShakeDurationAndP2PRegister (uint8_t shakeDuration, uint16_t shakeP2P) |
| Écrit la durée et la valeur P2P de secousse dans le capteur. | |
| uint8_t | MC3419_clearRegister (void) |
| Efface le registre de statut des interruptions du capteur. | |
| #define DUMMY 0xA5 |
| uint8_t MC3419_clearRegister | ( | void | ) |
Efface le registre de statut des interruptions du capteur.


| uint8_t MC3419_FiFo_CTRL_REG | ( | MC3419_FIFO_CTRL | ValCTRL | ) |
Configure le registre de contrôle FIFO du capteur.
| ValCTRL | Valeur de configuration |
| void MC3419_FIFO_TRESHOLD | ( | uint8_t | Fifo_Tresh | ) |
Définit le seuil FIFO du capteur.
| Fifo_Tresh | Seuil FIFO |
| uint8_t MC3419_ID | ( | void | ) |
Lit l'identifiant du capteur.

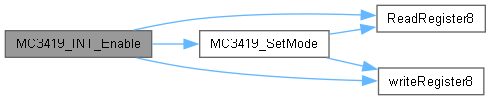
| void MC3419_INT_Enable | ( | MC3419_INTR_CTRL | INTR_CTRL | ) |
Active les interruptions du capteur.
| INTR_CTRL | Masque d'interruptions à activer |

| void MC3419_MotionCTRL | ( | MC3419_MotionControl | Motion | ) |
Configure le contrôle de mouvement du capteur.
| Motion | Masque de configuration |


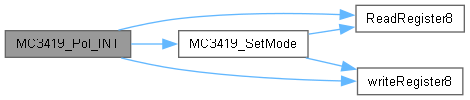
| void MC3419_Pol_INT | ( | MC3419_GPIO_CTRL | GPIO_CTRL | ) |
Définit la polarité des interruptions du capteur.
| GPIO_CTRL | Configuration GPIO |

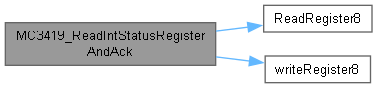
| uint8_t MC3419_ReadIntStatusRegisterAndAck | ( | void | ) |
Lit et acquitte le registre de statut des interruptions du capteur.

| uint8_t MC3419_ReadStatusRegister | ( | void | ) |
Lit le registre de statut des interruptions du capteur.


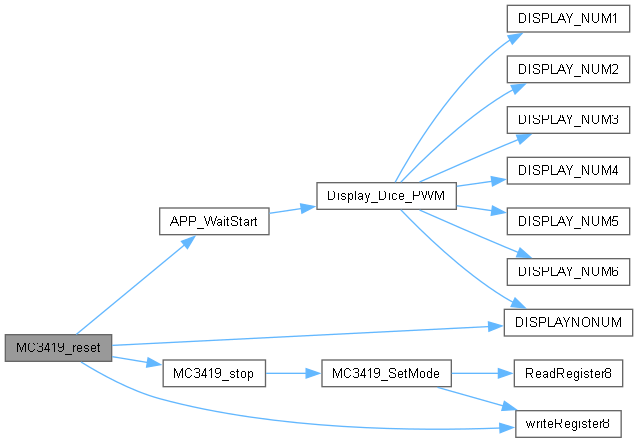
| void MC3419_reset | ( | void | ) |
Effectue un reset initial du capteur.
Réinitialise le capteur.
Met le capteur en veille, attend, effectue un power-on-reset, désactive les interruptions.

| void MC3419_SetMode | ( | MC3419_Mode | Mode | ) |
Définit le mode de fonctionnement du capteur.
| Mode | Mode à appliquer |
| void MC3419_SetRangleCtrl | ( | MC3419_Range | Range | ) |
Définit la plage de mesure du capteur.
| Range | Plage à appliquer |


| void MC3419_SetSampleRate | ( | MC3419_SamplRate | SampleRate | ) |
Définit la fréquence d'échantillonnage du capteur.
| SampleRate | Fréquence à appliquer |


| void MC3419_start | ( | void | ) |
Initialise le capteur MC34X9 avec la configuration par défaut.
Initialise le capteur avec la configuration par défaut.
Effectue un reset, configure la plage, la fréquence, les interruptions et met le capteur en mode actif.

| void MC3419_stop | ( | void | ) |
Met le capteur en mode standby (veille).
Met le capteur en mode veille.


| void MC3419_wake | ( | void | ) |
Met le capteur en mode wake (actif).
Met le capteur en mode réveil.


| void MC3419_WriteAnyMotionDebounceRegister | ( | uint8_t | tresholda | ) |
Écrit la valeur de debounce AnyMotion dans le registre du capteur.
| tresholda | Valeur de debounce |


| void MC3419_WriteAnyMotionRegister | ( | uint16_t | treshold | ) |
Écrit la valeur du seuil AnyMotion dans le registre du capteur.
| treshold | Seuil AnyMotion (16 bits) |


| void MC3419_WriteShakeDurationAndP2PRegister | ( | uint8_t | shakeDuration, |
| uint16_t | shakeP2P ) |
Écrit la durée et la valeur P2P de secousse dans le capteur.
| shakeDuration | Durée de secousse |
| shakeP2P | Valeur P2P |


| void MC3419_WriteShakeThresholdRegister | ( | uint16_t | Value | ) |
Écrit le seuil de détection de secousse (Shake) dans le capteur.
| Value | Seuil Shake |


| uint8_t ReadRegister8 | ( | uint8_t | address | ) |
Lit un registre 8 bits du capteur.
| address | Adresse du registre |
| void writeRegister8 | ( | uint8_t | address, |
| uint8_t | data ) |
Écrit une valeur 8 bits dans un registre du capteur.
| address | Adresse du registre |
| data | Donnée à écrire |