|
De_ES 2113
Make a dice
|

|
|
De_ES 2113
Make a dice
|
|
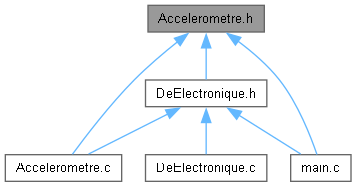
#include <stdint.h>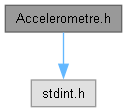
Go to the source code of this file.
Macros | |
| #define | addr_GPIO_CTRL 0x33 |
| #define | addr_DEV_STAT 0x05 |
| #define | addr_INTR_CTRL 0x06 |
| #define | addr_MODE 0x07 |
| #define | addr_SR 0x08 |
| #define | addr_MOTION_CTRL 0x09 |
| #define | addr_FIFO_STAT 0x0A |
| #define | addr_FIFO_R_P 0x0B |
| #define | addr_FIFO_W_P 0x0C |
| #define | addr_Xout_Ex_L 0x0D |
| #define | addr_Xout_Ex_H 0x0E |
| #define | addr_Yout_Ex_L 0x0F |
| #define | addr_Yout_Ex_H 0x10 |
| #define | addr_Zout_Ex_L 0x11 |
| #define | addr_Zout_Ex_H 0x12 |
| #define | addr_Status 0x13 |
| #define | addr_INTR_STAT 0x14 |
| #define | addr_Chip_ID 0x18 |
| #define | addr_Reset 0x1C |
| #define | addr_Range 0x20 |
| #define | addr_XOFFL 0x21 |
| #define | addr_XOFFH 0x22 |
| #define | addr_XGAIN8 0x22 |
| #define | addr_XGAIN 0x27 |
| #define | addr_YOFFL 0x23 |
| #define | addr_YOFFH 0x24 |
| #define | addr_YGAIN8 0x24 |
| #define | addr_YGAIN 0x28 |
| #define | addr_ZOFFL 0x25 |
| #define | addr_ZOFFH 0x26 |
| #define | addr_ZGAIN8 0x26 |
| #define | addr_ZGAIN 0x29 |
| #define | addr_FIFO_CTRL 0x2D |
| #define | addr_FIFO_CTRL_TR 0x2E |
| #define | addr_FIFO_INTR 0x2F |
| #define | addr_FIFO_CTRL2_SR2 0x30 |
| #define | addr_COMM_CTRL 0x31 |
| #define | addr_TF_LSB 0x40 |
| #define | addr_TF_MSB 0x41 |
| #define | addr_TF_SB 0x42 |
| #define | addr_AM_LSB 0x43 |
| #define | addr_AM_MSB 0x44 |
| #define | addr_AM_DB 0x45 |
| #define | addr_SHK_LSB 0x46 |
| #define | addr_SHK_MSB 0x47 |
| #define | addr_PK_P2P_DUR_LSB 0x48 |
| #define | addr_PK_P2P_DUR_MSB 0x49 |
| #define | addr_TIMER_CTRL 0x4A |
| #define | addr_RD_CNT 0x4B |
Functions | |
| void | MC3419_SetMode (MC3419_Mode Mode) |
| Définit le mode de fonctionnement du capteur. | |
| void | MC3419_SetRangleCtrl (MC3419_Range Range) |
| Définit la plage de mesure du capteur. | |
| void | MC3419_SetSampleRate (MC3419_SamplRate SampleRate) |
| Définit la fréquence d'échantillonnage du capteur. | |
| void | MC3419_wake (void) |
| Met le capteur en mode réveil. | |
| void | MC3419_stop (void) |
| Met le capteur en mode veille. | |
| void | MC3419_reset (void) |
| Réinitialise le capteur. | |
| void | MC3419_start (void) |
| Initialise le capteur avec la configuration par défaut. | |
| uint8_t | MC3419_ID (void) |
| Lit l'identifiant du capteur. | |
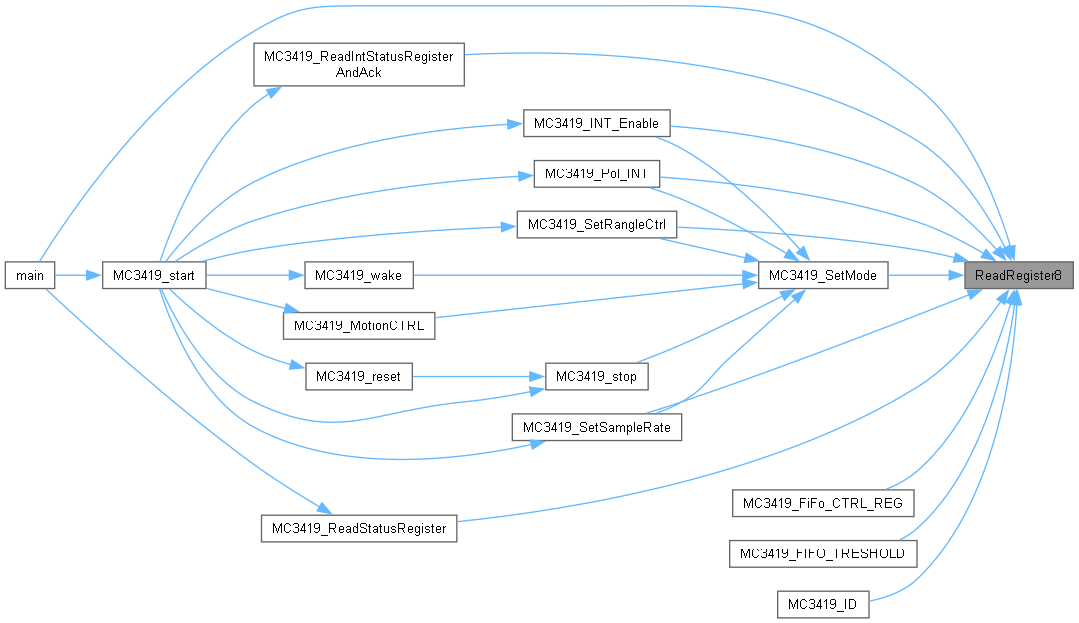
| uint8_t | ReadRegister8 (uint8_t address) |
| Lit un registre 8 bits du capteur. | |
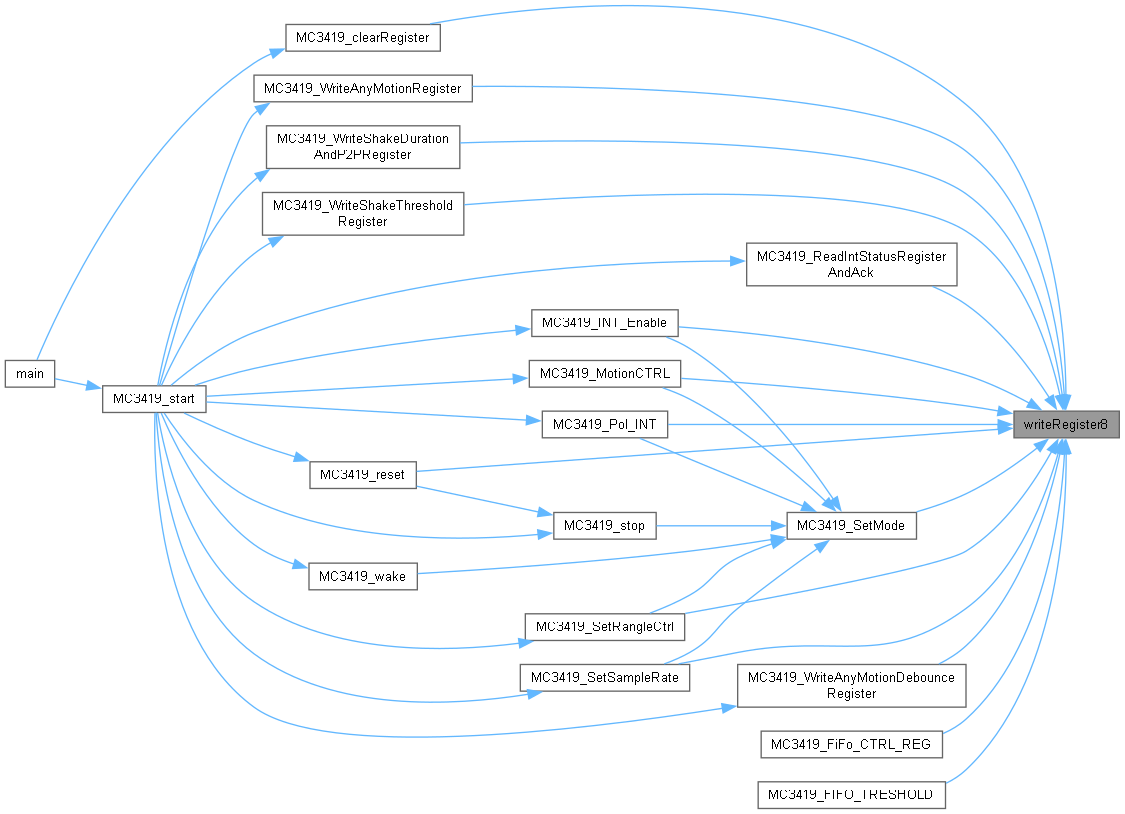
| void | writeRegister8 (uint8_t address, uint8_t data) |
| Écrit une valeur 8 bits dans un registre du capteur. | |
| void | MC3419_Pol_INT (MC3419_GPIO_CTRL GPIO_CTRL) |
| Définit la polarité des interruptions du capteur. | |
| void | MC3419_INT_Enable (MC3419_INTR_CTRL INTR_CTRL) |
| Active les interruptions du capteur. | |
| void | MC3419_MotionCTRL (MC3419_MotionControl Motion) |
| Configure le contrôle de mouvement du capteur. | |
| uint8_t | MC3419_ReadStatusRegister (void) |
| Lit le registre de statut des interruptions du capteur. | |
| uint8_t | MC3419_ReadIntStatusRegisterAndAck (void) |
| Lit et acquitte le registre de statut des interruptions du capteur. | |
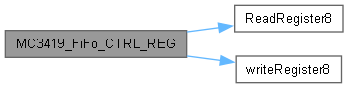
| uint8_t | MC3419_FiFo_CTRL_REG (MC3419_FIFO_CTRL ValCTRL) |
| Configure le registre de contrôle FIFO du capteur. | |
| void | MC3419_FIFO_TRESHOLD (uint8_t Fifo_Tresh) |
| Définit le seuil FIFO du capteur. | |
| void | MC3419_WriteShakeThresholdRegister (uint16_t Value) |
| Écrit le seuil de détection de secousse (Shake) dans le capteur. | |
| void | MC3419_WriteShakeDurationAndP2PRegister (uint8_t shakeDuration, uint16_t shakeP2P) |
| Écrit la durée et la valeur P2P de secousse dans le capteur. | |
| void | MC3419_WriteAnyMotionDebounceRegister (uint8_t tresholda) |
| Écrit la valeur de debounce AnyMotion dans le registre du capteur. | |
| uint8_t | MC3419_clearRegister (void) |
| Efface le registre de statut des interruptions du capteur. | |
| #define addr_AM_DB 0x45 |
| #define addr_AM_LSB 0x43 |
| #define addr_AM_MSB 0x44 |
| #define addr_Chip_ID 0x18 |
| #define addr_COMM_CTRL 0x31 |
| #define addr_DEV_STAT 0x05 |
| #define addr_FIFO_CTRL 0x2D |
| #define addr_FIFO_CTRL2_SR2 0x30 |
| #define addr_FIFO_CTRL_TR 0x2E |
| #define addr_FIFO_INTR 0x2F |
| #define addr_FIFO_R_P 0x0B |
| #define addr_FIFO_STAT 0x0A |
| #define addr_FIFO_W_P 0x0C |
| #define addr_GPIO_CTRL 0x33 |
| #define addr_INTR_CTRL 0x06 |
| #define addr_INTR_STAT 0x14 |
| #define addr_MODE 0x07 |
| #define addr_MOTION_CTRL 0x09 |
| #define addr_PK_P2P_DUR_LSB 0x48 |
| #define addr_PK_P2P_DUR_MSB 0x49 |
| #define addr_Range 0x20 |
| #define addr_RD_CNT 0x4B |
| #define addr_Reset 0x1C |
| #define addr_SHK_LSB 0x46 |
| #define addr_SHK_MSB 0x47 |
| #define addr_SR 0x08 |
| #define addr_Status 0x13 |
| #define addr_TF_LSB 0x40 |
| #define addr_TF_MSB 0x41 |
| #define addr_TF_SB 0x42 |
| #define addr_TIMER_CTRL 0x4A |
| #define addr_XGAIN 0x27 |
| #define addr_XGAIN8 0x22 |
| #define addr_XOFFH 0x22 |
| #define addr_XOFFL 0x21 |
| #define addr_Xout_Ex_H 0x0E |
| #define addr_Xout_Ex_L 0x0D |
| #define addr_YGAIN 0x28 |
| #define addr_YGAIN8 0x24 |
| #define addr_YOFFH 0x24 |
| #define addr_YOFFL 0x23 |
| #define addr_Yout_Ex_H 0x10 |
| #define addr_Yout_Ex_L 0x0F |
| #define addr_ZGAIN 0x29 |
| #define addr_ZGAIN8 0x26 |
| #define addr_ZOFFH 0x26 |
| #define addr_ZOFFL 0x25 |
| #define addr_Zout_Ex_H 0x12 |
| #define addr_Zout_Ex_L 0x11 |
| enum MC3419_AM_THRESH |
| enum MC3419_COMM_CTRL |
| enum MC3419_DeviceStat |
| enum MC3419_FIFO_CTRL |
| enum MC3419_FIFO_CTRL_2 |
| enum MC3419_FIFO_INTR |
| enum MC3419_FIFO_Stat |
| enum MC3419_FIFO_WPointer |
| enum MC3419_GPIO_CTRL |
| enum MC3419_INTR_CTRL |
| enum MC3419_INTR_Status |
| enum MC3419_Mode |
| enum MC3419_MotionControl |
| enum MC3419_PK_TRESH |
| enum MC3419_Range |
| enum MC3419_Reset_CTRL |
| enum MC3419_SamplRate |
| enum MC3419_Status |
| enum MC3419_TF_THRESH |
| enum MC3419_TIMER_CTRL |
| enum MC3419_XGAIN |
| enum MC3419_XOFF |
| enum MC3419_YGAIN |
| enum MC3419_YOFF |
| enum MC3419_ZGAIN |
| enum MC3419_ZOFF |
| uint8_t MC3419_clearRegister | ( | void | ) |
Efface le registre de statut des interruptions du capteur.


| uint8_t MC3419_FiFo_CTRL_REG | ( | MC3419_FIFO_CTRL | ValCTRL | ) |
Configure le registre de contrôle FIFO du capteur.
| ValCTRL | Valeur de configuration. |
| ValCTRL | Valeur de configuration |
| void MC3419_FIFO_TRESHOLD | ( | uint8_t | Fifo_Tresh | ) |
Définit le seuil FIFO du capteur.
| Fifo_Tresh | Seuil FIFO. |
| Fifo_Tresh | Seuil FIFO |
| uint8_t MC3419_ID | ( | void | ) |
Lit l'identifiant du capteur.

| void MC3419_INT_Enable | ( | MC3419_INTR_CTRL | INTR_CTRL | ) |
Active les interruptions du capteur.
| INTR_CTRL | Masque d'interruptions à activer. |
| INTR_CTRL | Masque d'interruptions à activer |

| void MC3419_MotionCTRL | ( | MC3419_MotionControl | Motion | ) |
Configure le contrôle de mouvement du capteur.
| Motion | Masque de configuration. |
| Motion | Masque de configuration |


| void MC3419_Pol_INT | ( | MC3419_GPIO_CTRL | GPIO_CTRL | ) |
Définit la polarité des interruptions du capteur.
| GPIO_CTRL | Configuration GPIO. |
| GPIO_CTRL | Configuration GPIO |

| uint8_t MC3419_ReadIntStatusRegisterAndAck | ( | void | ) |
Lit et acquitte le registre de statut des interruptions du capteur.

| uint8_t MC3419_ReadStatusRegister | ( | void | ) |
Lit le registre de statut des interruptions du capteur.


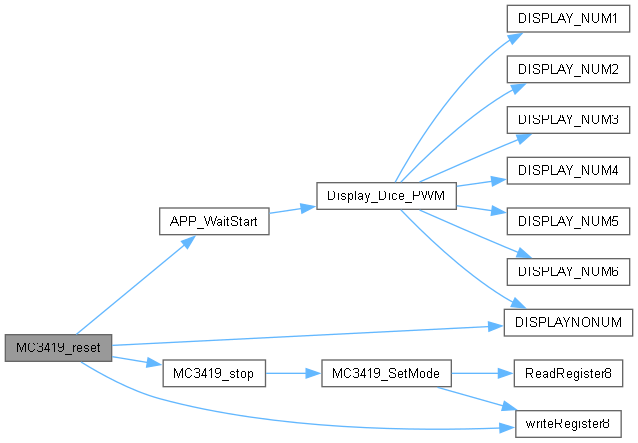
| void MC3419_reset | ( | void | ) |
Réinitialise le capteur.
Réinitialise le capteur.
Met le capteur en veille, attend, effectue un power-on-reset, désactive les interruptions.

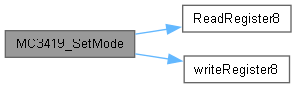
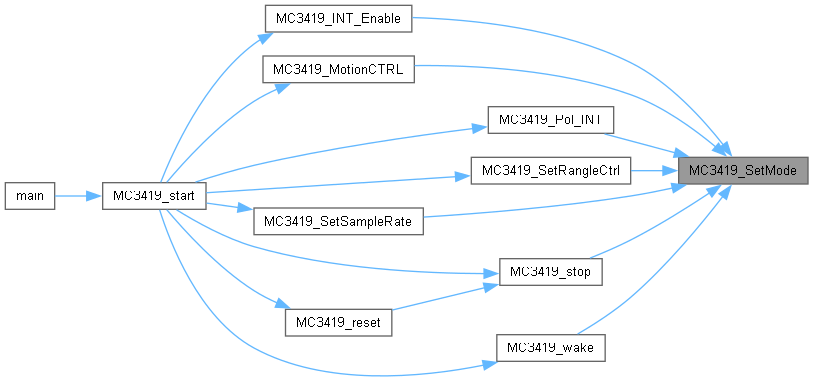
| void MC3419_SetMode | ( | MC3419_Mode | Mode | ) |
Définit le mode de fonctionnement du capteur.
| Mode | Mode à appliquer. |
| Mode | Mode à appliquer |
| void MC3419_SetRangleCtrl | ( | MC3419_Range | Range | ) |
Définit la plage de mesure du capteur.
| Range | Plage à appliquer. |
| Range | Plage à appliquer |


| void MC3419_SetSampleRate | ( | MC3419_SamplRate | SampleRate | ) |
Définit la fréquence d'échantillonnage du capteur.
| SampleRate | Fréquence à appliquer. |
| SampleRate | Fréquence à appliquer |


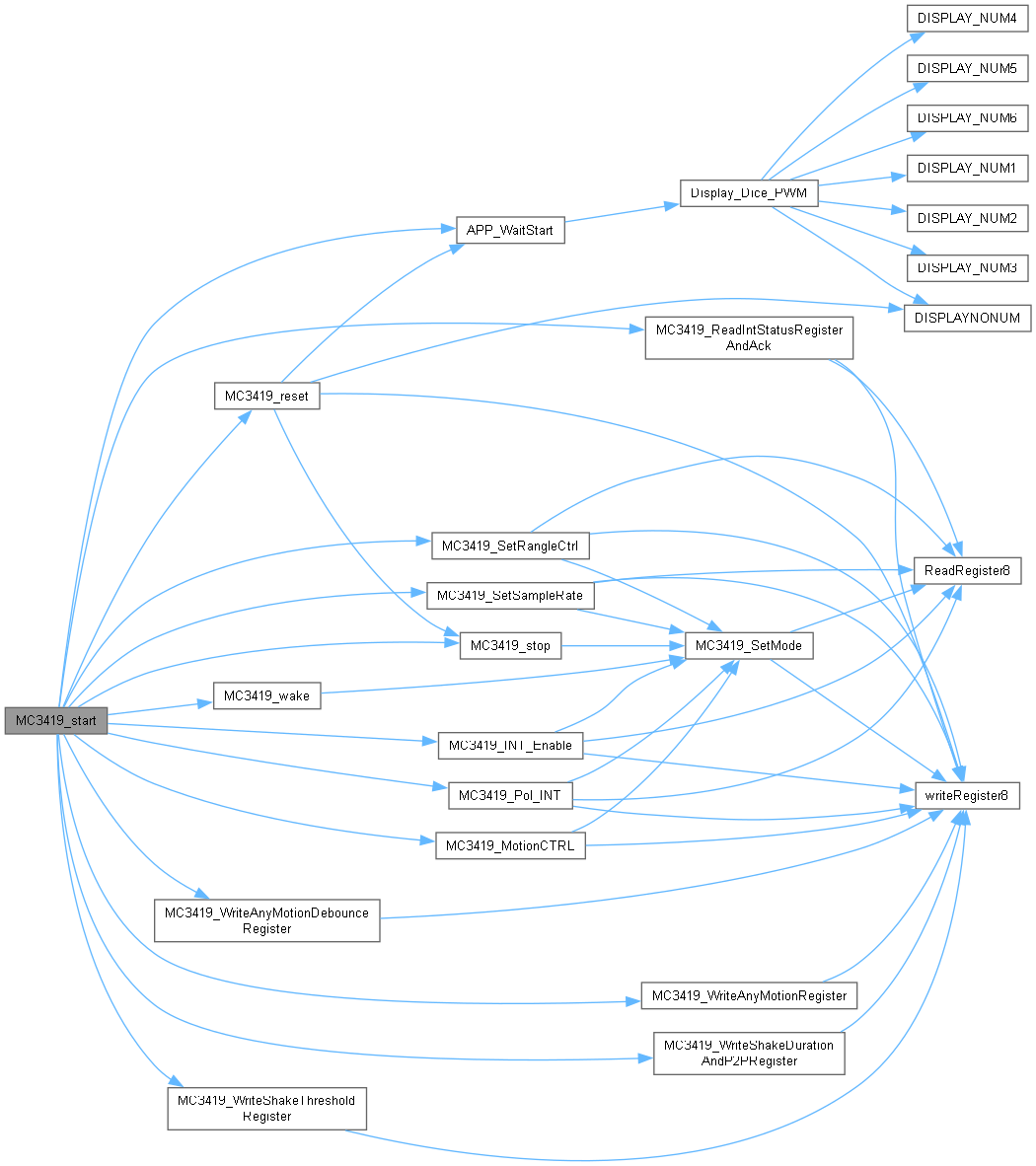
| void MC3419_start | ( | void | ) |
Initialise le capteur avec la configuration par défaut.
Initialise le capteur avec la configuration par défaut.
Effectue un reset, configure la plage, la fréquence, les interruptions et met le capteur en mode actif.

| void MC3419_stop | ( | void | ) |
Met le capteur en mode veille.
Met le capteur en mode veille.


| void MC3419_wake | ( | void | ) |
Met le capteur en mode réveil.
Met le capteur en mode réveil.


| void MC3419_WriteAnyMotionDebounceRegister | ( | uint8_t | tresholda | ) |
Écrit la valeur de debounce AnyMotion dans le registre du capteur.
| tresholda | Valeur de debounce. |
| tresholda | Valeur de debounce |


| void MC3419_WriteShakeDurationAndP2PRegister | ( | uint8_t | shakeDuration, |
| uint16_t | shakeP2P ) |
Écrit la durée et la valeur P2P de secousse dans le capteur.
| shakeDuration | Durée de secousse. |
| shakeP2P | Valeur P2P. |
| shakeDuration | Durée de secousse |
| shakeP2P | Valeur P2P |


| void MC3419_WriteShakeThresholdRegister | ( | uint16_t | Value | ) |
Écrit le seuil de détection de secousse (Shake) dans le capteur.
| Value | Seuil Shake. |
| Value | Seuil Shake |


| uint8_t ReadRegister8 | ( | uint8_t | address | ) |
Lit un registre 8 bits du capteur.
| address | Adresse du registre. |
| address | Adresse du registre |
| void writeRegister8 | ( | uint8_t | address, |
| uint8_t | data ) |
Écrit une valeur 8 bits dans un registre du capteur.
| address | Adresse du registre. |
| data | Donnée à écrire. |
| address | Adresse du registre |
| data | Donnée à écrire |