|
De_ES 2113
Make a dice
|

|
|
De_ES 2113
Make a dice
|
|
#include "Main.h"#include "Mc32Delays.h"#include "mcc_generated_files/system.h"#include "mcc_generated_files/spi1.h"#include "mcc_generated_files/pin_manager.h"#include "Accelerometre.h"#include "DeElectronique.h"#include "mcc_generated_files/tmr1.h"#include <stdbool.h>#include <stdlib.h>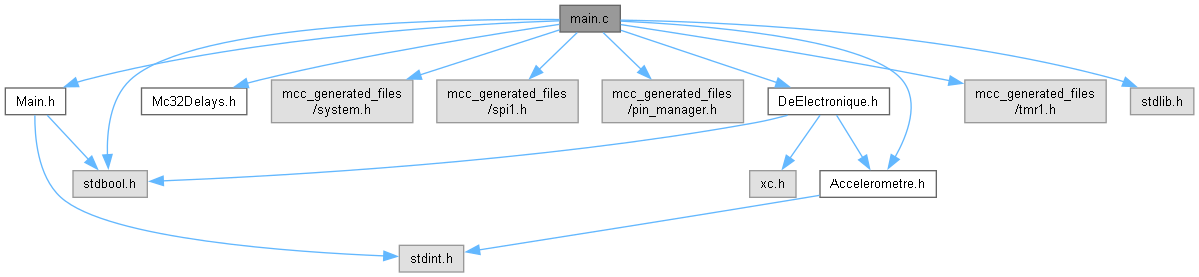
Functions | |
| int | main (void) |
| Point d'entrée principal de l'application. | |
| void | APP_TMR1_CallBack (void) |
| Callback du timer 1, décrémente le délai stocké dans AppData. | |
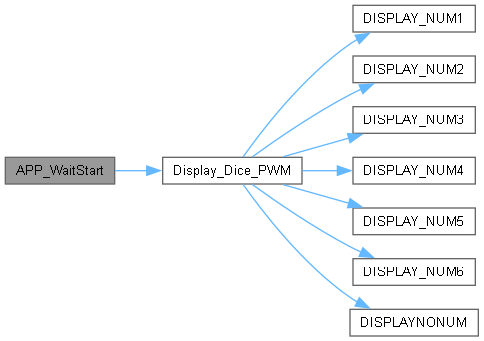
| void | APP_WaitStart (uint16_t waitingTime_ms) |
| Attente bloquante pendant un temps donné en ms (utilise le timer 1). | |
| void | SetStates (states newstate) |
| Change l'état courant de l'application. | |
| void | APP_CORETIMER_CALLBACK (void) |
| Callback du core timer pour gérer la variation de RC. | |
Variables | |
| appData | appdata |
| void APP_CORETIMER_CALLBACK | ( | void | ) |
Callback du core timer pour gérer la variation de RC.
| void APP_TMR1_CallBack | ( | void | ) |
Callback du timer 1, décrémente le délai stocké dans AppData.
End of File
| void APP_WaitStart | ( | uint16_t | waitingTime_ms | ) |
Attente bloquante pendant un temps donné en ms (utilise le timer 1).
Lance une attente bloquante pendant un temps donné (ms).
| waitingTime_ms | Durée d'attente en millisecondes |

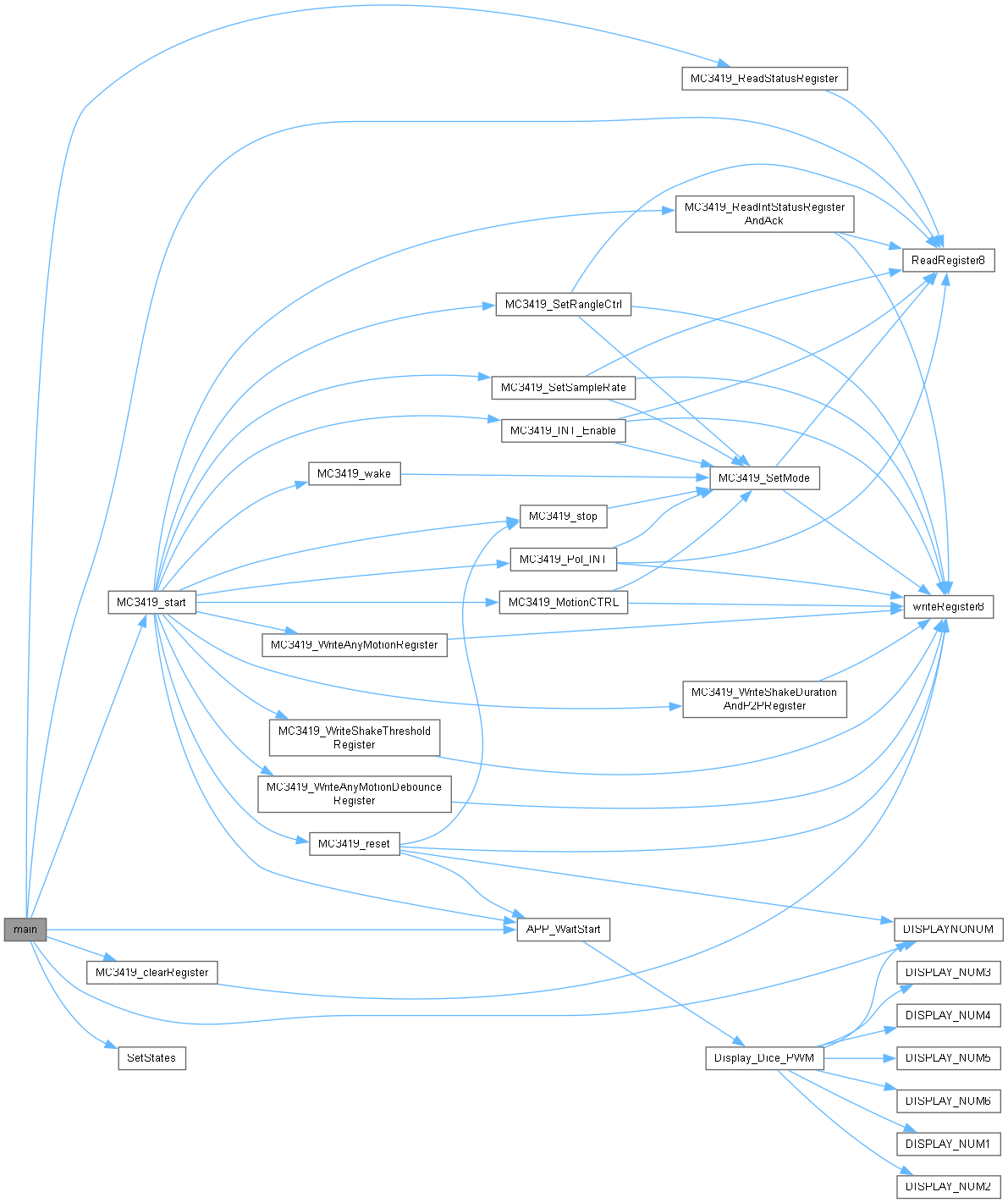
| int main | ( | void | ) |
Point d'entrée principal de l'application.
Initialisation de l'application.
Attente d'une interruption de l'accéléromètre.
Calcule la valeur pseudo-aléatoire du dé à partir des registres de l'accéléromètre.
Prépare l'affichage du résultat sur les LEDs.
Lance l'attente d'affichage du résultat.
Éteint les LEDs et met le système en veille si aucune interruption n'est détectée.
| void SetStates | ( | states | newstate | ) |
Change l'état courant de l'application.
| newstate | Nouvel état à appliquer |

| appData appdata |
Generated main.c file from MPLAB Code Configurator
@Company Microchip Technology Inc.
@File Name main.c la
@Summary This is the generated main.c using PIC24 / dsPIC33 / PIC32MM MCUs.
@Description This source file provides main entry point for system intialization and application code development. Generation Information : Product Revision : PIC24 / dsPIC33 / PIC32MM MCUs - 1.75.1 Device : PIC32MM0064GPL020 The generated drivers are tested against the following: Compiler : XC16 v1.35 MPLAB : MPLAB X v5.05 Section: Included Files